- KABLO ÇEŞİTLERİ
 DRONE VE DRONE MALZEMELERİ
DRONE VE DRONE MALZEMELERİ- ARDUİNO
- ELEKTRONİK KOMPONENTLER
- KABLO UÇLARI VE YÜKSÜKLERİ
Kablo Uçları- Kablo Kapama Parçası
- Dişi Faston Tip İzoleli Kablo Uçları
- İzoleli Yuvarlak Kablo Uçları
- İzoleli Erkek Terminaller Kablo Ucu
- Sıkmalı Ek Muflar
- Tam İzoleli Dişi Faston Tip Kablo Uçları
- İzoleli Erkek Faston Tip Kablo Uçları
- İzoleli Kablo Mufları
- Bıçak Tip Kablo Uçları
- İzoleli Erkek / Dişi Geri Dönüşlü Faston Tip Kablo Uçları
- İzoleli Soket Tipi Erkek Terminaller
- İzoleli Çatal Tipi Kablo Uçları
- İğne Tip İzoleli Kablo Uçları
- Hızlı Kablo Ek Yapma Aparatı
- Tam İzoleli Polyamid Bayrak Tip Terminaller
- İzoleli Soket Tipi Dişi Terminaller
- Tam İzoleli Polyamid Dişi Faston Kablo Uçları
- DİRENÇ






Pixhawk 2.4.8 Uçuş Kontrol Kartı Seti
- Pixhawk 2.4.8 Uçuş Kontrol Kartı Seti, güvenli ve hızlı alışverişin adresi İndirimAl.Com'dan şimdi sipariş verebilirsiniz. Bu set, uçuş kontrol sisteminizi güçlendirmek için ihtiyacınız olan her şeyi sunar.
- Ürün Kodu: MTR-30803
- Marka: Nochta
- Kategori: Drone Parça ve Aksesuarları
- Stok: Stokta yok
- %22indirim15.477,95 TL12.092,15 TLKARGO BEDAVA
- En geç 26 Haziran Cuma günü kargoda!
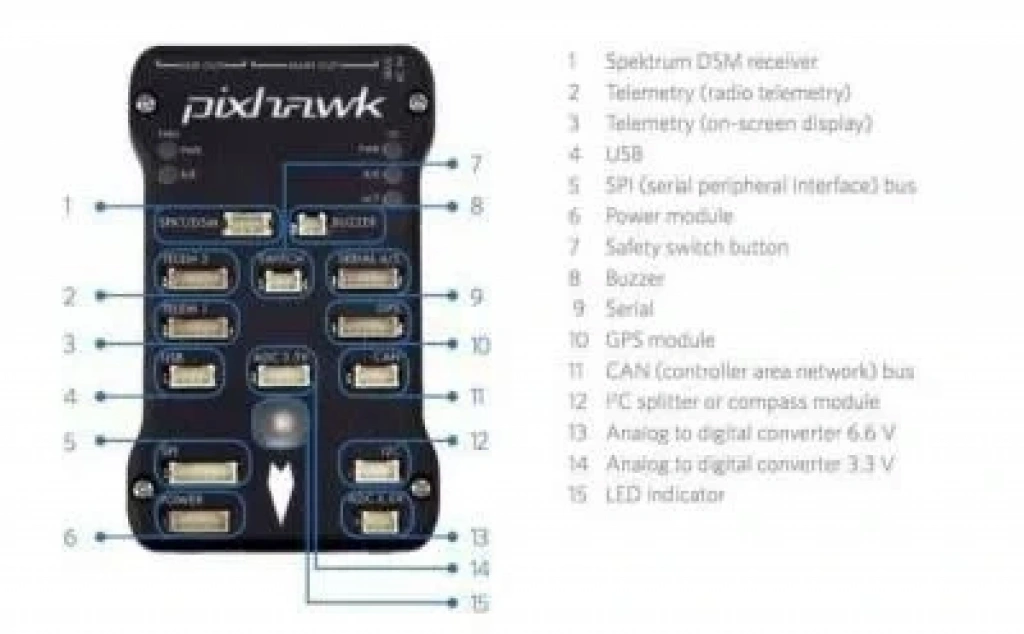
Pixhawk 2.4.8 Uçuş Kontrol Kartı Seti
Pixhawk 2.4.8 Uçuş Kontrol Kartı Seti, açık kaynaklı Ardupilot projesi (APM) temelli, yüksek performanslı bir uçuş kontrol sistemidir. Bu set, sabit kanat, döner kanat veya çoklu rotorlu hava araçlarınızı (hatta tekneler ve arabalar) tamamen otonom hale getirmenizi sağlar. Programlanabilir GPS görevleri sayesinde, istediğiniz noktalara otomatik olarak ulaşabilen, güvenli ve stabil uçuşlar gerçekleştirebilen bir araç oluşturabilirsiniz.
Pixhawk 2.4.8, otonom stabilizasyon, yol noktası navigasyonu ve iki yönlü telemetri desteği sunan kapsamlı bir uçuş kontrol cihazıdır. Uçuş verilerini inceleyebilir, parametreleri ayarlayabilir ve mobil cihazlarınız üzerinden kontrol edebilirsiniz. İsteğe bağlı telemetri radyo sistemi ile gerçek zamanlı veri akışı ve tam kontrol imkanı elde edersiniz.
Pixhawk sisteminin sunduğu entegre yapı, Unix/Linux benzeri programlama ortamı ve gelişmiş PX4 sürücü katmanı sayesinde karmaşık görevleri kolayca gerçekleştirebilir, uçuş davranışlarını özelleştirebilir ve sisteminizin güvenilirliğini artırabilirsiniz. Mevcut APM ve PX4 kullanıcıları için sorunsuz bir geçiş deneyimi sunar.
Teknik Özellikler
| Özellik | Değer |
| İşlemci | Gelişmiş 32-bit ARM CortexM4 M4 işlemci |
| İşletim Sistemi | NuttX RTOS gerçek zamanlı işletim sistemi |
| PWM/Servo Çıkışları | 14 adet |
| Veri Arayüzleri | UART, I2C, SPI, CAN |
| Uçuş Modları | Otomatik ve manuel mod |
| Ana İşlemci | 32bit STM32F427 Cortex M4, FPU ile |
| Yardımcı İşlemci | 32-bit STM32F103 arızaya dayanıklı ortak işlemci |
| Saat Hızı | 168 MHz |
| RAM | 128 KB |
| Flash Bellek | 2 MB |
| Jiroskop | L3GD20H 16 bit jiroskop |
| İvmeölçer/Manyetometre | X4HBA 303H 14 bit ivmeölçer / manyetometre |
| İvmeölçer/Jiroskop | MPU 6000 3 eksenli ivmeölçer / jiroskop |
| Barometre | MS5607 barometresi |
Paket İçeriği
- 1 x Pixhawk PX4 Otopilot PIX 2.4.8 32 Bit Uçuş Kontrolörü
- 1 x Buzzer
- 1 x Ledli Güvenlik Butonu
- 1 x 4 GB Mikro SD kart ve Mikro SD kart adaptörü
- Ağırlık: 0.1 Kg
Eğer kargoyu saat 14:00`den sonra verdiyseniz ürününüzün stoklarda olması durumunda ertesi gün kargolama yapılmaktadır.